Safely conduct BVLOS drone operations
Maintain a clear picture of the airspace around you. Understand surrounding air traffic and perform tactical deconfliction with confidence.
JustFly is a traffic information service designed for drone operators conducting BVLOS missions, enabling continuous awareness of surrounding air traffic and supporting tactical deconfliction.
— THE PROBLEM
Operating beyond line of sight means operating with uncertainty
During BVLOS operations, drone pilots can no longer rely on direct visual observation to understand
what is happening around them. As a result:
Surrounding air traffic hard to monitor
Without direct visual observation, continuous situational awareness is difficult to maintain.Without direct visual observation, continuous situational awareness is difficult to maintain.
Conflicts identified too late
Potential hazards are only noticed when the margin for safe response is already reduced.
Decisions based on assumptions
Rather than real conditions, forcing pilots to operate conservatively and inefficiently.
No reliable real-time air picture
The issue is not access to data, it is the lack of a coherent, actionable operational picture.
— THE APPROACH
Built for the complexity of BVLOS missions
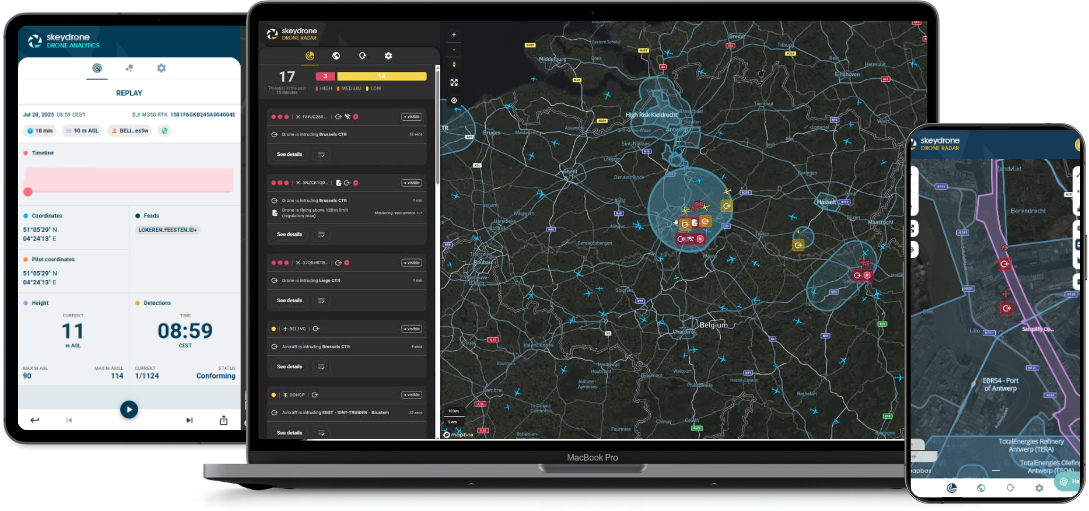
JustFly provides a comprehensive, real-time view of the surrounding airspace – delivering a single, coherent picture of both crewed and uncrewed traffic throughout the mission.
Real-time air traffic picture
Combining multiple data sources into one coherent operational view.
Crewed and uncrewed traffic
Full visibility of both crewed aircraft and drone activity in the surrounding airspace.
Continuous situational awareness
Updated throughout the mission so operators always understand their environment.
Multi-sensor integration
RF, radar, camera and acoustic hardware to detect recreational and professional drones.
Conflict detection support
Early identification of potential traffic conflicts before they become critical.
Operational decision support
Actionable awareness rather than isolated data tracks.
— HOW IT WORKS
From detection to action: structured airspace awareness
JustFly applies the DITTA™ methodology to transform traffic data into actionable understanding:
Detection
Noticing a drone is present in the air and displaying it on a digital map in real time.
Identification
Determining its type, serial number, authorisation status and operator ID.
Tracking
Following its position, movement and behaviour over time to understand patterns.
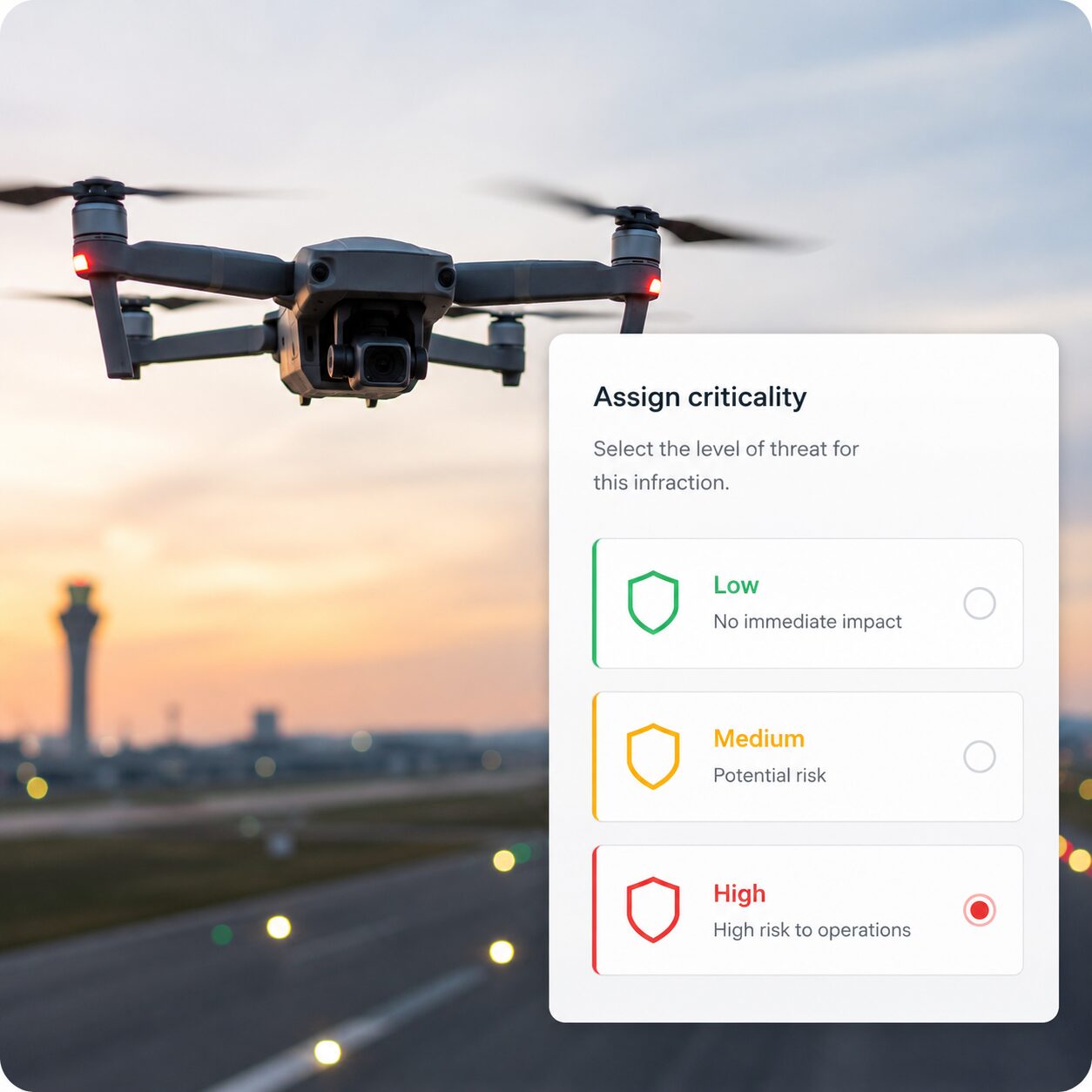
Threat Assessment
Deciding whether it poses a credible risk based on its behaviour.
Action
Initiating an appropriate response based on the assessed level of risk.
Airspace activity, understood in relation to your operation.
— OUTCOMES
Operational confidence for BVLOS missions
Safe and scalable BVLOS operations

“During our BVLOS missions transporting petrochemical samples from the plant to the lab, JustFly is indispensable to achieve real-time awareness of surrounding air traffic.” Ryan Quintaes, Managing Director ALC
— WHAT TO RETAIN
Confidence throughout your mission
JustFly enables operators to plan and execute BVLOS missions with full situational awareness, replacing uncertainty with real-time understanding and enabling safe, efficient operations in complex airspace.